5. Les blocs "capteur de rotations" et "mathématique"
- MAT-2101-3 Modélisation algébrique
Description : Dans cette activité, vous programmerez le robot pour qu'il puisse afficher une distance parcourue en cm, en utilisant un modèle algébrique.
Matériel requis :
Matériel requis :
- Ordinateur
- Robot
|
Document de l'élève à imprimer
(cliquer sur l'image) |

|
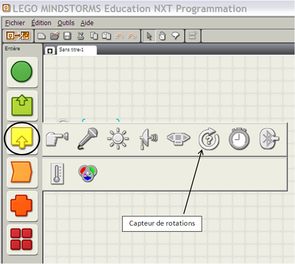
Introduction: Repérer le bloc "capteur de rotations"
Le bloc "capteur de rotations", qui se trouve dans les moteurs, permet au robot de calculer le nombre de rotations complètes d'un moteur lorsque le robot se déplace.
Ce bloc peut envoyer, via des fils de données, ce nombre de rotations à un autre bloc afin de le faire afficher sur l'écran. |

|
|
1. Ouvrir la palette entière des blocs.

|
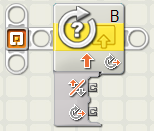
2. Repérer le bloc "capteur de rotations".
|
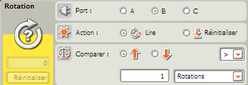
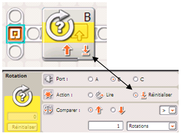
3. Le capteur de rotation et ses paramètres.
|
Remarque: chaque bloc porte le logo de la catégorie de blocs à laquelle il appartient.

|
|
4. Réinitialisation d'un capteur de rotations
Il est bon de prendre l'habitude de remettre à zéro le capteur de rotations. Vous verrez qu'il sera nécessaire de le faire lors de certains défis. |
|
Défi 1: Compter le nombre de rotations
Votre robot avancera pendant des durées prgrammées en secondes et comptera le nombre de rotations faites par l'une des roues. L'écran ne peut afficher directement un nombre, il faut donc transformer ce nombre en texte avant de l'afficher.
Votre robot avancera pendant des durées prgrammées en secondes et comptera le nombre de rotations faites par l'une des roues. L'écran ne peut afficher directement un nombre, il faut donc transformer ce nombre en texte avant de l'afficher.
|
Instructions
|
Exemple de programmation
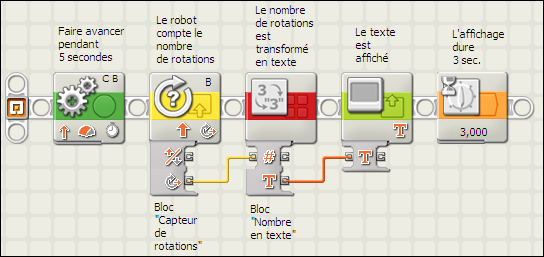
Cliquer sur l'image pour l'agrandir.
Cliquer sur l'image pour obtenir une version imprimable.
|
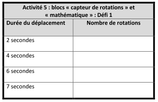
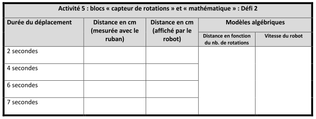
Défi 2: Calcul de la distance en cm par le robot
Dans l'activité 3 (calculs et déplacements), vous avez appris à transformer des "centimètres" en "rotations" pour faire avancer votre robot sur des distances données.
Peut-on demander au robot de prendre un nombre de rotations, et d'afficher la distance parcourue en cm?
Il est possible de le faire en utilisant le bloc "mathématique".
Dans l'activité 3 (calculs et déplacements), vous avez appris à transformer des "centimètres" en "rotations" pour faire avancer votre robot sur des distances données.
Peut-on demander au robot de prendre un nombre de rotations, et d'afficher la distance parcourue en cm?
Il est possible de le faire en utilisant le bloc "mathématique".
|
Instructions
|
Exemple de programmation
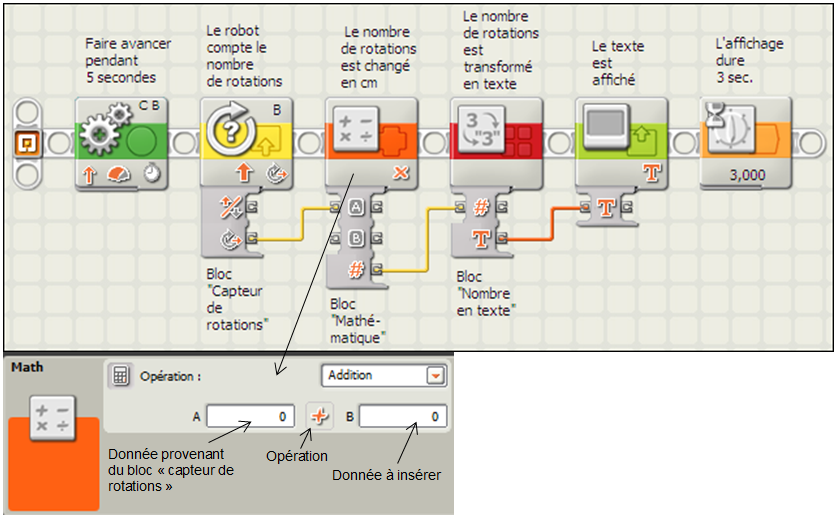
Cliquer sur l'image pour l'agrandir.
|

|
Retour réflexif
|
- Dans cette activité, concernant les modèles algébriques, qu'est-ce qui varie?
- Y a-t-il des données constantes?
- Réécrivez vos modèles algébriques en identifiant clairement vos variables.
- Le premier modèle permet-il de trouver la distance parcourue par le robot, peu importe le temps proposé?
- Faites rouler votre robot pendant cette durée et comparez le résultat affiché avec le résultat obtenu par calcul.
- Le deuxième modèle permet-il de trouver la vitesse du robot, peu importe la distance parcourue et le temps? Cette vitesse est-elle la même dans tous les cas ?
- Quelles ont été vos difficultés lors de cette activité?
