2. Programmation de base: faire déplacer le robot
Description de l'activité: Dans cette activité, vous apprendrez à faire déplacer votre robot avec l'aide d'un logiciel de programmation.
Matériel requis :
- robot de base
- ordinateur (logiciel de programmation "NXT Programming")
1. Survol du logiciel
Survol du logiciel de programmation en groupe.
2. Faire déplacer le robot
Voici votre premier défi de programmation. Une fois terminé, en faire la démonstration à l'enseignant.
Note: au besoin, consulter la partie "Survol du logiciel en 10 étapes" de cette activité (ci-dessous), qui fait un survol de quelques blocs de programmation du logiciel.
Note: au besoin, consulter la partie "Survol du logiciel en 10 étapes" de cette activité (ci-dessous), qui fait un survol de quelques blocs de programmation du logiciel.
|
Instructions de programmation:
1. Faire avancer le robot de 3 rotations, en ligne droite; 2. Lui faire prendre une pause de 2 secondes; 3. Le faire reculer de 2 rotations, en ligne droite; 4. Faire tourner le robot de 2,9 rotations en sens antihoraire (le robot tournera de 180°); 5. Lui faire prendre une pause d’une seconde; 6. Le faire ensuite reculer de 1,5 rotations, en ligne droite; 7. Lui faire émettre un son; 8. Lui faire afficher "Stop". |
Pour faciliter la programmationEn cliquant sur l'image ci-contre, vous obtiendrez une page vierge de programmation contenant les instructions du défi. Il ne vous reste qu'à faire la programmation.
Cliquer sur l'image pour ouvrir la page de programmation.
|
Retour réflexif
Pistes de réflexion
- Comment avez-vous procédé pour faire la programmation?
- Quelles ont été vos difficultés lors de la programmation du robot?
Survol du logiciel en 10 étapes
1. Icône du logiciel sur le bureau

|
2. Fenêtre initiale du logiciel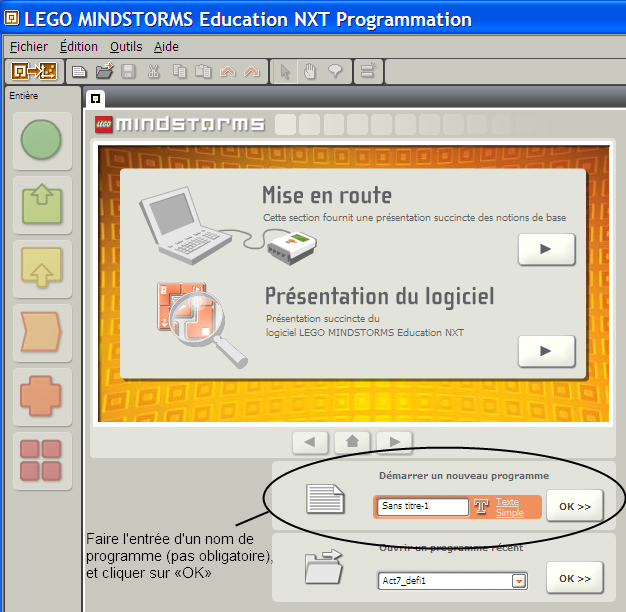
Cliquer sur l'image pour l'agrandir.
|
3. Interface de programmation
Cliquer sur l'image pour l'agrandir.
|
|
4. Le bloc « déplacer »
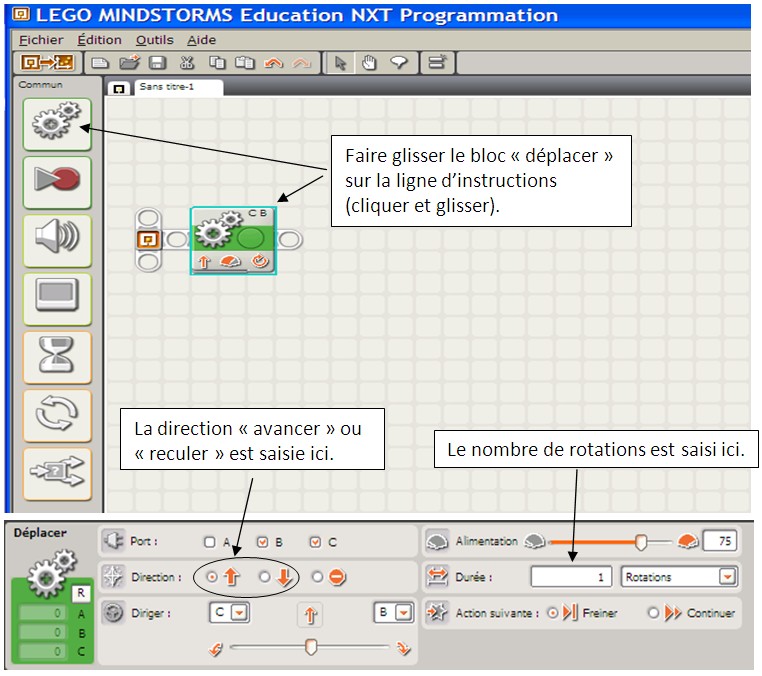
Cliquer sur l'image pour l'agrandir.
|
5. Le bloc « Attendre »

Cliquer sur l'image pour l'agrandir.
|
|
6. Le bloc « Son »

Cliquer sur l'image pour l'agrandir.
|
7. Le bloc « Afficher »

Cliquer sur l'image pour l'agrandir.
|
8. Le bloc « Boucle »
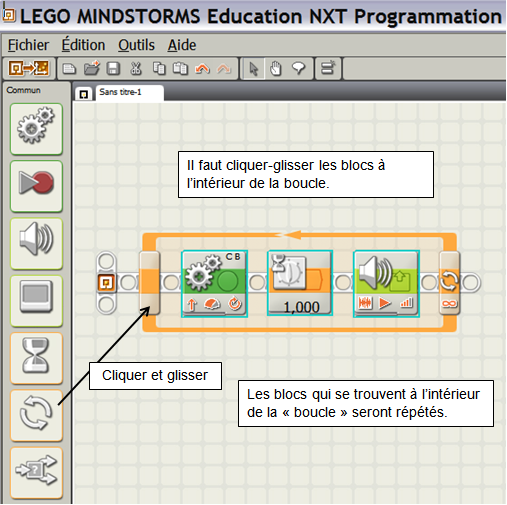
Cliquer sur l'image pour l'agrandir.
|
9. Pour faire tourner le robot
(source : http://www.sitedunxt.fr/articles/print.php?id=13)
Première façon
La glissière de commande permet de faire tourner le robot. Il suffit de la régler en la glissant vers l’un des 2 moteurs. Il y aura alors une roue qui tournera plus que l’autre.
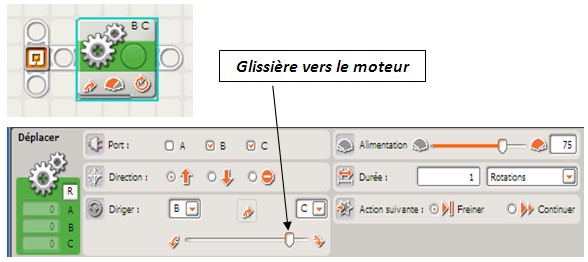
Cliquer sur l'image pour l'agrandir.
Plus vous déplacez la glissière vers un moteur et plus la vitesse de celui-ci est réduite par rapport à l'autre moteur, ce qui fait tourner le robot.
Le robot tournera, formera un tracé en courbe, mais de façon peu précise. Nous ne disposons d'aucune précision sur le rayon de virage de la ligne courbe !
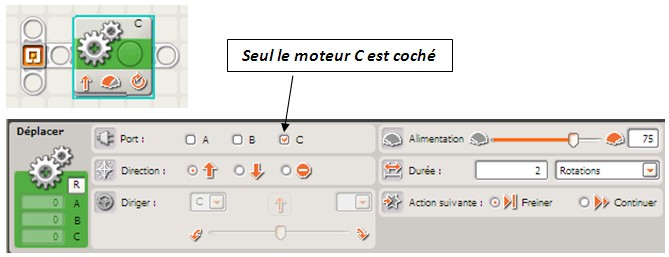
Deuxième façon (plus précise)
Une façon plus précise de faire tourner le robot consiste à bloquer une roue pendant que l'autre tourne. On appelle cette technique "un crochet", du fait de la forme de la trajectoire du robot.
Le robot tournera, formera un tracé en courbe, mais de façon peu précise. Nous ne disposons d'aucune précision sur le rayon de virage de la ligne courbe !
Deuxième façon (plus précise)
Une façon plus précise de faire tourner le robot consiste à bloquer une roue pendant que l'autre tourne. On appelle cette technique "un crochet", du fait de la forme de la trajectoire du robot.
Cliquer sur l'image pour l'agrandir.
|
10. Transmettre la programmation au robot
1. Allumer la brique NXT (bouton orange); |

|
|
2 . Cliquer sur le bouton illustrant une flèche vers le bas dans le coin inférieur droit de l’interface du logiciel (le programme sera téléchargé dans la brique NXT);
|

|
|
3. Le programme ainsi téléchargé se trouve dans le dossier « Software files » (il faut appuyer successivement sur le bouton orange de la brique NXT).
Une fois sur "Software files", il faut cliquer une autre fois sur le bouton orange.
|

|
